Autres solutions d'automatisation avec de l'automatisation low cost
L'automatisation low cost peut être utilisée de manière universelle en raison de sa grande modularité. Une solution individuelle peut être constituée à partir du système modulaireet être complétée par d'autres produits pour répondre à une application donnée. Les articulations pour robots peuvent être combinées aux moteurs pas à pas igus® conventionnels ou étanches, mais aussi à d'autres moteurs ou entraînements pneumatiques. Ce système d'articulations modulaire n'a pas non plus été créé pour une commande donnée et offre donc une très grande latitude lors de la planification et de la mise en œuvre d'opérations d'automatisation.

Aide à l'entreposage robolink®
robolink® range des pièces sur une étagère d'entreposageAide à l'entreposage robolink®
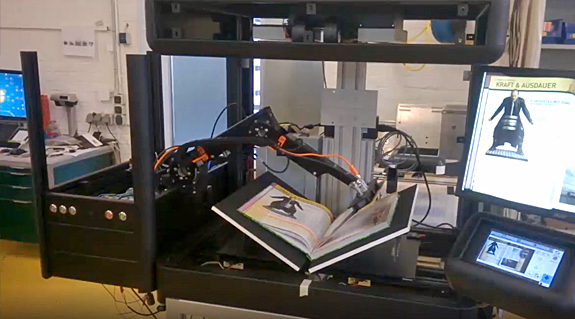
Scanner de livres automatisé
robolink® tourne les pages dans un scanner de livresScanner de livres automatisé
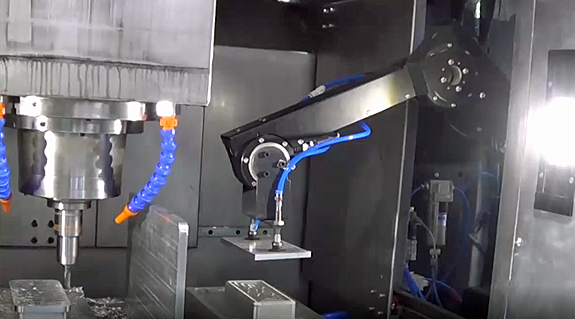
Machine-outil
robolink® sort des composants d'une machine-outilMachine-outil
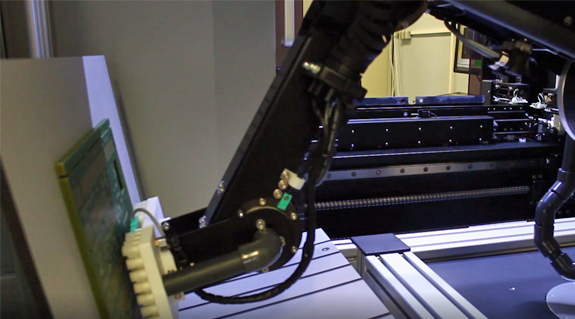
Contrôle qualité de platines
robolink dépose des platines dans un dispositif de testContrôle qualité de platines

Emballage automatisé de masques respiratoires
Emballage automatisé de masques respiratoiresEmballage automatisé de masques respiratoires

Extension de machines semi-automatisées
Extension de machines semi-automatiséesExtension de machines automatisées

