FAQ robolink® W, système d'articulations modulaire pour robots
Foire aux questions
1) Quelles sont les variantes d'articulations proposées par igus® sur stock ?
6 articulations sont actuellement disponibles en standard
1 – RL-50-PL1 : articulation purement oscillante2 – RL-50-TL1 : articulation purement rotative
3 – RL-50-001 : articulation à 2 axes avec plage d'oscillation de +/-90° (« le grand classique »)
4 – RL-50-002 : articulation à 2 axes avec plage d'oscillation de +130°/-50° (« asymétrique »)
5 – RL-50-003 : articulation à 2 axes avec plage d'oscillation de +180°/0° (« à rabattre »)
6 – RL-90-BL1 : articulation de base à 2 axes, (« plus grande et plus puissante »)
Des variantes spéciales des articulations peuvent aussi être fournies si besoin est.
2) Quels angles sont possibles ? Poids propres ? Couples ?
La liste suivante donne les données fondamentales. Ce tableau se trouve aussi dans notre catalogue.| Référence | Nombre de câbles |
Angle d'oscillation |
Angle de rotation |
Poids | Charge maxi | ||||
|---|---|---|---|---|---|---|---|---|---|
| Entraînement propre |
Passage possible |
Standard (avec butée) |
Option (*sans butée) |
Standard (avec butée) |
Option (*sans butée) |
[gr] | Oscillation [Nm] |
Rotation [Nm] |
|
| 1. Articulation oscillante RL-50-PL1 |
2 | 4 | 180° (±90°) | 210° (±105°) |
- | - | 235 | 12 | - |
| 2. Articulation rotative RL-50-TL1 |
2 | 8 | - | - | 340° (±170°) |
540° (±270°) |
245 | - | 5 |
3. Articulation |
4 | 4 | 180° (±90°) |
210° (±105°) |
340° (±170°) |
540° (±270°) |
345 | 12 | 5 |
4. Articulation |
4 | 4 | 180° (+130°/-50°) |
240° (+135°/-105°) |
340° (±170°) |
540° (±270°) |
345 | 12 | 5 |
| 5. Articulation à 2 axes RL-50-003 |
4 | 4 | 180 ° (+180°/0°) |
235° (+180°/-55°) |
340° (±170°) |
540° (±270°) |
400 | 12 | 5 |
| 6. Articulation de base RL-90-BL1 |
4 | 8 | 180° (±90°) |
190° (±95°) |
180° (±90°) |
- | 1250 | 20 | 10 |
3) Comment les articulations peuvent-elles être combinées ?
Chaque articulation est munie de tire-câbles. Ces câbles doivent toujours être guidés au travers de l'articulation se trouvant en dessous. Toutes les combinaisons d'articulations ne sont donc pas possibles. Il est toutefois possible de combiner des bras articulés individuels de 1 à 6 DOF et de réaliser des cinématiques très variées. Nous sommes à votre service. L'illustration suivante montre quelques possibilités de combinaison et les nouveaux types d'articulations RL-50-003 et RL-90-BL1 permettent d'innombrables autres possibilités !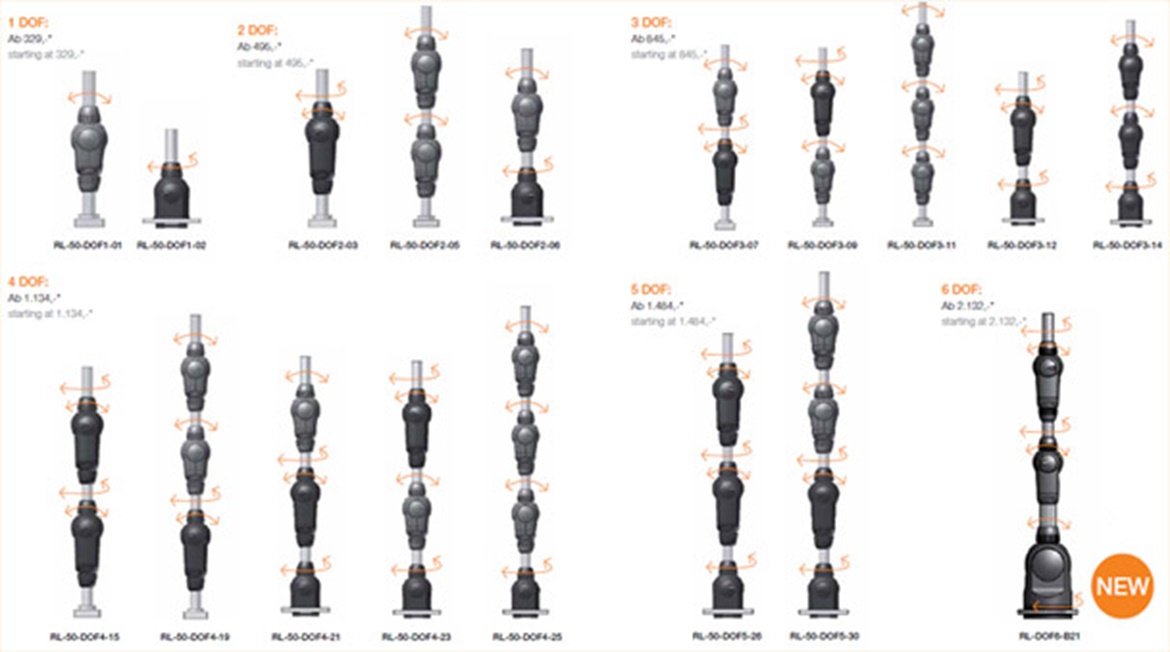
4) Qu'entend-on par « système modulaire » ?
L'idée de base du système modulaire robolink® est de fournir à nos clients des composants (mécaniques) individuels avec lesquels un système robotique peut être constitué. Des bras articulés plus ou moins complexes en fonction de la complexité de la tâche peuvent être configurés et commandés. igus® construit les bras selon les spécifications du client et livre des unités prêtes à raccorder. Un assemblage d'articulations individuelles (« comme avec des LEGO® ») n'est toutefois pas possible.5) Pourquoi ne peut-on pas modifier soi-même les bras articulés ?
Toutes les articulations sont entraînées par des câbles. 2 câbles sont nécessaires par degré de liberté (principe antagoniste). Si les câbles de l'articulation supérieure (2) passaient au travers de l'articulation inférieure (1) sans guidage, les mouvements des deux articulations ne seraient plus indépendants l'un de l'autre. Pour parvenir à cette indépendance, il est indispensable que la tension du câble de l'articulation supérieure (2) soit découplée des mouvements de l'articulation inférieure (1). Ce découplage est assuré par un système spécial à câbles Bowden dans l'ouverture de l'articulation inférieure (cf. schéma). Les câbles se déplacent de nouveau sans contrainte dans les tubes de liaison entre les articulations.Lors de la commande de bras articulés pluriaxiaux auprès d'igus®, tous les éléments à câbles Bowden sont pré-assemblés et le système complet est toujours livré prêt à raccorder dans la configuration voulue avec tous les câbles et tubes.

Tuyau pneumatique (pince)
2Quadruple câble Bowden
3Câble capteur articulation 2
44 câbles se déplacent librement dans le tube
5Câble Bowden simple pour la rotation
68 câbles se déplacent librement dans le tube
6) Quelles courses / forces de câbles sont nécessaires pour déplacer les articulations ?
Le point d'attaque des câbles à l'intérieur des articulations est défini par la désignation de la taille :RL-50 : diamètre d'action de 50 mm (rotation et oscillation)
RL-90 : diamètre d'action de 90 mm (oscillation) ou de 120 mm (rotation)
La course de câble sur une articulation RL-50 se calcule donc avec
π x d/4 ≈ 39 mm pour un mouvement angulaire de 90°
π x d/2 ≈ 79 mm pour un mouvement angulaire de 180°
Les forces de traction du câble (en fonction des couples à réaliser) peuvent aller jusqu'à 600 N.
7) Qu'est-ce qui est livré avec une articulation ?
Articulation montée en plastique (PA 2200) avec logements (aluminium anodisé dur en standard)
Câbles en Dyneema
Tiges en aluminium (standard = 100 mm, fournies, longueurs spéciales sur demande)
Capteurs d'angle en option (-WS), 3 m de câble pour les capteurs, montés et testés. Manchons pour le raccordement après consultation, gratuits.
8) Qu'est-ce qui est livré avec un bras articulé ?
Toutes les articulations pré-assemblées conformément au point 7)
Tous les câbles passés avec des segments spéciaux à câble Bowden conformément au point 5)
Tubes en aluminium entre les articulations, individualisés aux spécifications
Plaque de montage en bas du bras
Câbles capteurs passés (option -WS), 3 m de câble capteur monté et testé. Manchons pour le raccordement après consultation, gratuits.
9) Qu'est-ce qui est livré avec un « système complet » ?
Bras articulé tel que décrit au point 6) AVEC en plus une unité d'entraînement composée des éléments suivants :Moteurs pas à pas igus®, nombre en fonction du nombre d'axes du bras
Réducteur planétaire pour chaque moteur
« Poulie d'entraînement » pour le raccordement des câbles à l'entraînement
« Dispositif de tension » pour retendre facilement les poulies d'entraînement
Boîtier dans lequel les moteurs sont montés et sur lequel le bras est installé, en différentes versions
NON compris :
Pinces (disponibles en option chez igus®, autres produits également adaptables)
Composants de commande
Câbles de puissance pour moteurs (disponibles en option chez igus®)
10) Quels capteurs d'angle sont utilisés ?
Les articulations sont équipées (en option) de capteurs d'angle incrémentaux de la société Austriamicrosystems (AS5304A). Il n'est techniquement pas possible d'avoir des codeurs absolus à l'heure actuelle. Afin de définir la position zéro, nous utilisons un capteur à effet de Hall qui est placé au milieu de la plage d'oscillation ou de rotation de l'articulation. Chaque articulation doit donc d'abord être « initialisée » lors de l'application de la tension. Vous trouverez de plus amples informations sur la commutation des capteurs et sur l'attribution des câbles dans notre documentation technique.Résolution des codeurs (elle varie selon les articulations ) :
4.640 signaux / 360° pour tous les mouvements rotatifs de l'articulation de taille RL-50
(29 paires de pôles x 160 signaux / paire de pôles) ≈ 0,078°
4.960 signaux / 360° pour tous les mouvements oscillants de l'articulation de taille RL-50
(31 paires de pôles x 160 signaux / paire de pôles) ≈ 0,073°
9.920 signaux / 360° pour tous les mouvements de l'articulation de taille RL-90 (« base »)
(62 paires de pôles x 160 signaux / paire de pôles) ≈ 0,036

Capteur à effet de Hall rotation
2Codeur rotation
3Codeur oscillation
4Capteur à effet de Hall rotation
capteurs d'angle magnétiques incrémentaux. Les capteurs ont une résolution de ~0,07° par axe. Toutes les unités à capteurs prêtes à monter pour leurs articulations. Chacune avec 3 m de câble capteur (6 conducteurs par DOF)
11) Les bras articulés peuvent-ils aussi être utilisés dans l'eau ?
Oui, les composants sont pour l'essentiel en plastique (PA2200), en aluminium anodisé, inox (vis), en PE Dyneema (câbles) et en laiton (manchons). Les capteurs peuvent être commandés en version enrobée (-SE = sealed encoder).

12) Quels types d'entraînements sont possibles ?
Des entraînements extrêmement variés peuvent être utilisés pour assurer le mouvement des câbles. Parmi eux des entraînements manuels (« levier »), des entraînements pneumatiques (« muscle pneumatique » par exemple) ou des moteurs électriques (moteurs BLDC, DC, servo, linéaires, pas à pas). igus® propose des moteurs pas à pas avec réducteurs planétaires comme concept d'entraînement possible. Sont disponibles :- Moteur pas à pas NEMA23 (à cordon ou connecteur) avec réducteur planétaire 1:16
- Moteur pas à pas NEMA17 (à cordon ou encodeur) avec réducteur planétaire 1:35
Moteur pas à pas
2Réducteur planétaire
3Poulie d'entraînement avec dispositif de tension

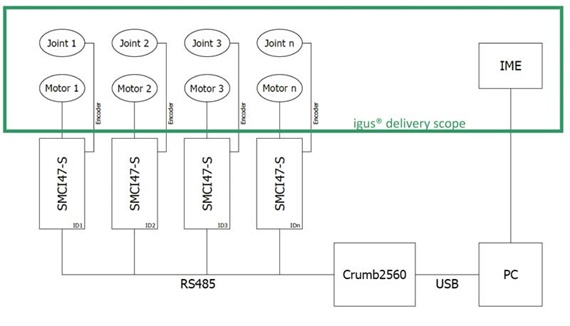
13) Comment les bras articulés robolink® sont-ils commandés et régulés ?
igus® ne met pas au point, ne construit ni ne distribue des composants de commande. La fourniture d'un système robolink®se limite soit au bras articulé, soit au bras articulé avec « unité d'entraînement ».C'est au client qu'il appartient de se procurer les composants de commande.
14) Que dois-je faire pour pouvoir utiliser le logiciel open source IME (igus® motion editor) igus® ?
Le logiciel peut être téléchargé gratuitement. Il s'agit d'une interface de programmation graphique avec laquelle des mouvements simples peuvent être programmés et enregistrés. Il ne comprend pas de commande sur des voies données (ou de cinématique inverse).15) Quels matériaux sont utilisés ?
Articulations : Composants en polyamide PA 2200, vis en 304L, bagues en aluminium anodisé dur, iglidur® J ou inox également possibles.Tubes de liaison : Aluminium anodisé, plastique renforce de fibres de verre ou de fibres de carbone également possible.
Câbles :Câbles en Dyneema, embouts en laiton.
16) Quelles pinces peuvent être utilisées ?
Par principe, toutes les pinces possibles et imaginables peuvent être combinées à nos bras articulés. Les pinces devraient toutefois toujours être aussi légères que possible en raison de la capacité de charge relativement réduite du système. Les sociétés SCHUNK, FESTO ou FIPA par exemple offrent une vaste gamme de pinces pneumatiques légères. Il arrive souvent qu'un système pneumatique ne soit pas souhaité et il faudra alors faire appel à des pinces électriques. GIMATIC, SCHUNK ou SOMMER par exemple proposent des pinces électriques très légères (qui sont toutefois nettement plus chères que des pinces pneumatiques simples). Depuis 2013, igus® propose ses propres pinces simples en plastique, leur moteur électrique se trouvant dans le tube robolink®. Les mors de la pince peuvent aussi être choisis pour convenir à l'application.17) Combien coûtent les articulations et les « systèmes » ?
Tous les prix des articulations et des systèmes se trouvent dans notre catalogue. En gros, un « système complet » avec moteurs, réducteurs, boîtier, articulations et capteurs coûte un peu plus de 1.000 € par axe. Soit environ 6.000 € pour un système à 6 DOF. Un bras articulé SANS moteurs (mais avec des capteurs) coûterait la moitié environ (soit 500 € par axe environ). Exemple :6 DOF environ 3.000 €

6 DOF environ 6.000 €


