Changer de langue :
Precise, clearance-free plain and linear bearings for assistant robots in surgery
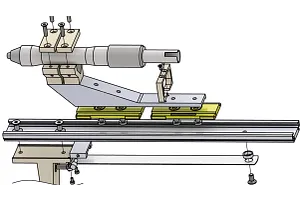
drylin glide bars ensure absolutely clearance-free bearings
This system, developed at the Institute for Mechatronic Systems at Leibniz Universität Hannover, supports doctors in minimally invasive cochlear implant surgery for the treatment of sensorineural deafness and profound hearing loss. The technique requires a puncture hole that can be located up to 35mm below the skull and in the immediate vicinity of anatomical structures that require protection. The system must therefore work very precisely and also meet medical hygiene requirements such as steam sterilisation. The surgical instrument guide now includes a drylin N glide bar with two carriages. In addition, several iglidur X plain bearings are used, which are ideal for use in medical applications as they are lubrication-free.

Products used

Conseil
Je me réjouis par avance de répondre à vos questions
igus® SASEcrire un e-mail
Livraison et conseil technique
En personne :
Du lundi au vendredi de 8h à 20h. Le samedi de 8h à 12h à Cologne en Allemagne
En ligne :
24h/24